惯性导航技术作为实现精确导航的关键手段之一,其中的惯性测量单元(IMU)发挥着至关重要的作用。IMU 通常由加速度计和陀螺仪组成,能够实时测量物体的加速度和角速度等信息,进而通过复杂的算法和计算来确定物体的位置、速度和姿态。
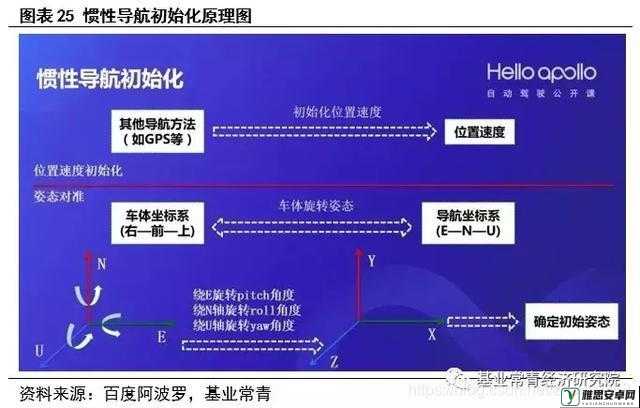
IMU 的工作原理基于牛顿运动定律和陀螺力学原理。加速度计用于测量物体在各个方向上的加速度,通过对加速度的积分可以得到物体的速度和位移。陀螺仪则用于测量物体的角速度,从而确定物体的姿态变化。这两个传感器的协同工作,为惯性导航系统提供了丰富的数据基础。
在实际应用中,IMU 具有许多显著的优点。它不依赖于外部信号源,如卫星导航系统,因此在卫星信号受到干扰或无法覆盖的环境中,如室内、地下、山区等,仍能提供连续和可靠的导航信息。IMU 的响应速度快,能够实时地反映物体的运动状态变化,适用于对导航精度和实时性要求较高的场合,如航空航天、军事、自动驾驶等领域。
IMU 也存在一些局限性。由于测量误差的累积,随着时间的推移,惯性导航的精度会逐渐降低。为了提高惯性导航的精度和稳定性,通常需要采用多种技术手段进行误差补偿和修正。例如,通过与其他导航系统(如卫星导航系统、视觉导航系统等)进行组合导航,可以有效地减小惯性导航的误差,提高导航的整体精度。
IMU 的性能还受到传感器精度、采样频率、温度等因素的影响。为了获得更高精度的 IMU,需要不断改进传感器的制造工艺和性能,提高系统的采样频率和数据处理能力,并采取有效的温度补偿措施。
在未来,随着技术的不断进步和发展,惯性导航 - IMU 技术有望在更多领域得到广泛应用和深入发展。例如,在智能穿戴设备、虚拟现实和增强现实等领域,高精度的惯性导航将为用户带来更加沉浸式和流畅的体验。随着人工智能和机器学习技术的引入,惯性导航系统的误差预测和补偿能力将得到进一步提升,从而为实现更加精确和可靠的导航提供有力支持。
参考文献:
1. 秦永元. 惯性导航[M]. 科学出版社, 2014.
2. Titterton D H, Weston J L. Strapdown Inertial Navigation Technology[M]. IET, 2004.
3. 高钟毓. 惯性导航系统技术[M]. 清华大学出版社, 2012.
4. Parkinson B W, Spilker J J. Global Positioning System: Theory and Applications[M]. American Institute of Aeronautics and Astronautics, 1996.
5. El-Sheimy N, Noureldin A. Inertial Sensors Technology[M]. Springer, 2008.